Attention : le traitement des données de même que cette page sont en cours de développement.
Notre démarche s’inscrit dans le cadre de l’étude scientifique du REseau NAtional GPS permanent (RENAG) dont un des objectifs est l’étude des déformations terrestres en France. Pour plus de détails sur RENAG : http://webgnss.unice.fr.
Pour le moment nous traitons un sous-jeu de données du Réseau GNSS Permanent (RGP) qui lui-même englobe un nombre de partenaires et sous-réseaux différents. Pour plus de détails sur le RGP et ses partenaires : http://rgp.ign.fr.
Les stations des pays frontaliers de la France proviennent des réseaux IGS et EUREF. Pour plus de détails voir http://igscb.jpl.nasa.gov et http://www.epncb.oma.be.
A ce jour seules les cartes représentant les vitesses horizontales et verticales sont présentées, mais prochainement les séries temporelles de chaque station ainsi qu’un fichier de vitesse seront disponibles sur ce site.
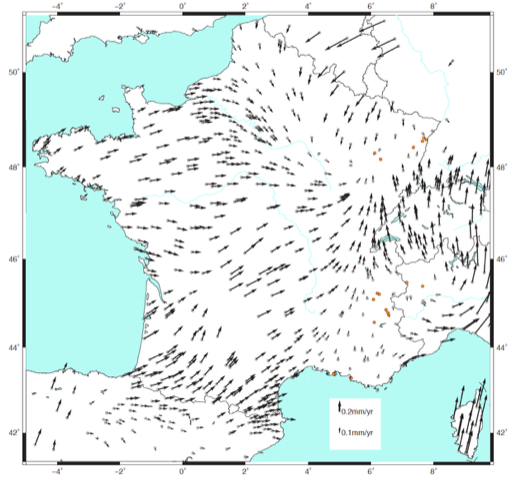
Carte des vitesses horizontales filtrées dans un référentiel Europe Occidentale stable (calcul intégrant les données jusqu’au 1er janvier 2016)
Masson, C., Mazzotti, S., Vernant, P. and Doerflinger, E.: Extracting small deformation beyond individual station precision from dense GNSS networks in France and Western Europe, Solid Earth, 10(6), 1905–1920, doi:10.5194/se-10-1905-2019, 2019.
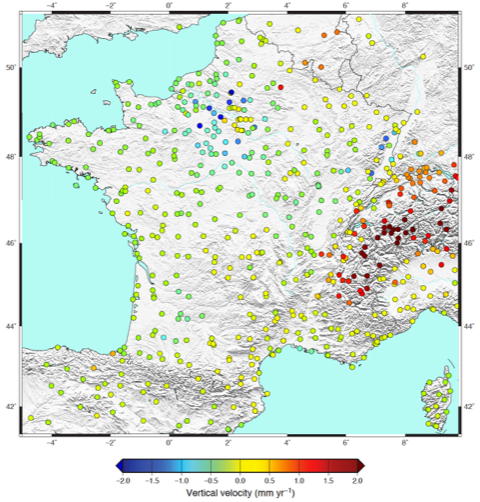
Carte des vitesses verticales filtrées (calcul intégrant les données jusqu’au 1er janvier 2016)
Masson, C., Mazzotti, S., Vernant, P. and Doerflinger, E.: Extracting small deformation beyond individual station precision from dense GNSS networks in France and Western Europe, Solid Earth, 10(6), 1905–1920, doi:10.5194/se-10-1905-2019, 2019.
Les données GPS sont traitées avec le logiciel GPSPPP v1.5 fourni par la Division des levés géodésiques, Ressources naturelles Canada (Héroux and Kouba, 2001; Kouba and Héroux, 2001). Pour chaque station, la position quotidienne est calculée en utilisant une combinaison simple-différence dite "ionosphere-free" des observations de pseudo-distance et de phase (Kouba, 2009).
Le traitement utilise :
- les orbites, horloges, et paramètres de pôle terrestre précis "Repro 1" de l'International GNSS Service (Dow et al., 2009) ;
- les calibrages absolus de centre de phase des antennes des satellites et stations (Schmidt et al., 2007), version IGS08 ;
- les modèles IERS2003 (Mc-Carthy and Petit, 2004) et FES2004 (Lyard et al., 2006) pour les corrections de charges des marées de Terre solide et océaniques ;
- les grilles "Vienna Mapping Functions" VMF1 (Boehm et al., 2006) pour le calcul du délai troposphérique ;
- les corrections de 2ème et 3ème ordres du délai ionosphérique (Hernandez-Pajares et al., 2007).
Les séries temporelles de chaque station sont analysées individuellement avec le logiciel statistique R (R Core Team, 2013).
Pour chaque composante Nord, Est, et Verticale, une inversion linéaire moindre-carré permet de définir les termes suivants: vitesse moyenne, amplitude et phase du cycle annuel et semi-annuel, amplitude des décalages ("offset") associés aux changements d'antenne et de monument. Une procédure itérative est utilisée pour identifier et rejeter les décalages non-significatifs à 99%. Les écarts-types des vitesses sont calculés sur la base des formules d'incertitude pour un modèle de bruit coloré (Williams, 2003).
Pour chaque composante, l'indice spectral de la série temporelle est estimé afin de calculer un modèle de bruit et un écart-type spécifique. Les valeurs moyennes d'écart-type des vitesses varient principalement avec la durée de la série temporelle et sont de l'ordre de 0.1 mm/a pour les séries de 7-8 ans et plus.
Le traitement en simple différence avec le logiciel GPSPPP produit des coordonnées quotidiennes alignées sur le référentiel définit par les orbites et horloges précises de l'IGS. Les coordonnées ne sont donc pas exactement alignées sur un référentiel donné, mais sur la réalisation du référentiel IGS à l'époque des orbites et horloges (e.g., IGS08b depuis le 7 octobre 2012).
Toutefois, la campagne de retraitement globale de l'IGS (Repro 1) a permis de mettre à disposition des produits cohérents (depuis 1994) et compatibles avec les dernières réalisations de l'ITRF (ITRF2005 et ITRF2008). Cette nette amélioration de la cohérence intrinsèque et de la qualité des produits IGS permet également une amélioration de la précision des solutions de type PPP d'un facteur 3 - 4, en comparaison avec les solutions basées sur les produits pré-Repro 1 (Griffiths et al., 2009). Ceci est confirmé par l'analyse des séries temporelles issues de GPSPPP qui ne montre aucun décalage significatif aux dates de changements de référentiel des produits IGS.
Par ailleurs, la comparaison des vitesses estimées par GPSPPP avec les vitesses officielles de l'ITRF2008 (Altamimi et al., 2011) aux 8 stations communes indique une différence mineure de l'ordre de 0.1 - 0.2 mm/a, non-significative (Nord: 0.1 +/- 0.2; Est: 0.2 +/- 0.4; Vt: -0.1 +/- 0.5 mm/a). Les vitesses issues directement du traitement GPSPPP sont donc correctement alignées avec l'ITRF2008 à mieux que 0.2 mm/a en moyenne.
NB: L'alignement des coordonnées n'étant pas vérifié, cette solution ne peut pas être utilisée comme une réalisation officielle de l'ITRF2008 aux stations traitées.
Masson, C., Mazzotti, S., Vernant, P. and Doerflinger, E.: Extracting small deformation beyond individual station precision from dense GNSS networks in France and Western Europe, Solid Earth, 10(6), 1905–1920, doi:10.5194/se-10-1905-2019, 2019.
Altamimi Z., X. Collilieux, L. Métivier (2011), ITRF2008: an improved solution of the International Terrestrial Reference Frame, J. Geod., 85 (8), 457-473, doi:10.1007/s00190-011-0444-4.
Boehm, J., B. Werl, H. Schuh (2006), Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Median-Range Weather Forecast operational analysis data, J. Geophys. Res., 111, B02406, doi:10.1029/2005JB003629.
Dow, J.M., R. E. Neilan, C. and Rizos (2009), The International GNSS Service in a changing landscape of Global Navigation Satellite Systems, J. Geod., 83, 191–198, DOI:10.1007/s00190-008-0300-3.
Griffiths, J., G. Gendt, G., T. Nischan, andJ. Ray (2009), Assessment of the orbits from the 1st IGS reprocessing campaign, EOS Trans., AGU Fall Meeting abstract G13A-04.
Hernandez-Pajares, M., Juan, J. M., Sanz, J., and Orus, R., 2007, Second order ionospheric term in GPS: Implementation and impact on geodetic estimates, J. Geophys. Res., 112, B08417, doi:10.1029/2006JB004707.
Héroux, P., and J. Kouba (2001), GPS Precise Point Positioning using IGS orbit products, Phys. Chem. Earth (A), 26, 573-‐578.
Kouba, J., and P. Heroux (2001), Precise Point Positioning using IGS orbit and clock products, GPS Solutions, 5 (2), 12-28, doi:10.1007/PL00012883.
Kouba, J. (2009), A guide to using International GNSS Service (IGS) products, UsingIGSProductsVer21.pdf.
Lyard, F., F. Lefevre, T. Letellier, and O. Francis, 2006, Modelling the global ocean tides: modern insights from FES2004, Ocean Dyn., 56 (5-6), 394-415.
McCarthy, D., G. and Petit (eds) (2004), IERS Conventions (2003). IERS Technical Note N. 32, Verlag des Bundesamts fur Kartographie und Geodasie, Frankfurt am Main, 127pp.
R Core Team (2013), R: A language and environment for statistical computing, http://www.R-project.org.
Schmid, R., P. Steigenberger, G. Gendt, M. Ge, and M. Rothacher (2007), Generation of a consistent absolute phase center correction model for GPS receiver and satellite antennas, J. Geod., 81 (12) 781-‐798.
Williams, S. D. P. (2003), The effect of coloured noise on the uncertainties of rates estimated from geodetic time series, J. Geod., 76, 483–494, doi:10.1007/s00190-002-0283-4.